



Intro
Turns
Turning Radius
Turning radius is the minimum circular path a vehicle can make while turning (e.g. U-turn)
Bicycle Kinematic Model
 $$
R = \frac{L}{\tan(\theta)}
$$
$$
R = \frac{L}{\tan(\theta)}
$$
- — turning radius
- — wheelbase
- — steering angle
- Bigger steering angle → larger → smaller radius
Full geometric / real wheel model
- Vehicle modeled with all four wheels and wheelbase geometry
- Turns account for:
- Wheelbase (b)
- Steering angles of front wheels
- Tire width (w) (for curb-to-curb or wall-to-wall radius)
- Right-triangle geometry for inner vs outer wheels
- — wheelbase (distance between front and rear axles)
- — steering angle of the front wheel(s)
- — tire width


Corner Behavior
The behavior for a vehicle turning a corner: Brake → Ease off → Neutral → Maintain → Accelerate → Full throttle
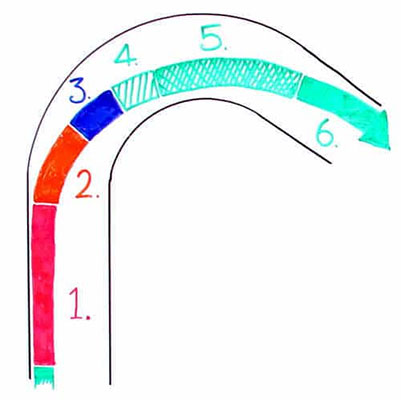
- Braking – Slow down in a straight line
- Trail Braking – Gradually release brake while turning
- Transition – No brake or throttle (smooth switch)
- Balanced Throttle – Maintain speed at apex (~10–20%)
- Increasing Throttle – Accelerate as steering opens
- Max Throttle – Full acceleration on exit