



Intro
The ros2_control is a framework for (real-time) control of robots using ROS2. It’s packages are a rewrite of ros_control packages used in ROS
ros2_control flow
/cmd_vel → diff_drive_controller → hardware interface (write()) → serial or PWM ↑ controller manager ↓ joint_state_broadcaster ← hardware interface (read()) ← encoders
ros_control
https://wiki.ros.org/ros_control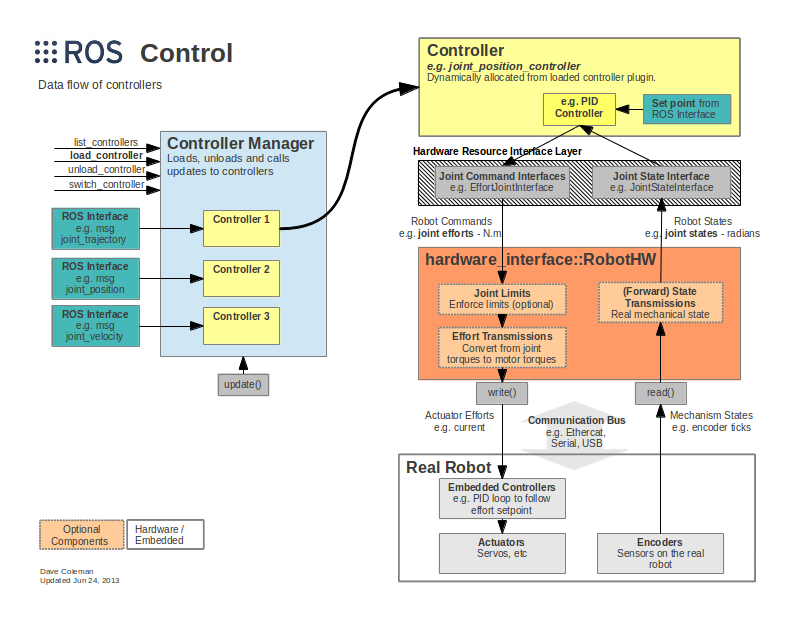
The ros_control packages takes as input the joint state data from your robot’s actuator’s encoders and an input set point. It uses a generic control loop feedback mechanism, typically a PID controller, to control the output, typically effort, sent to your actuators. ros_control gets more complicated for physical mechanisms that do not have one-to-one mappings of joint positions, efforts, etc but these scenarios are accounted for using transmissions.
ros2_control packages
📦 ros2_control - the main interfaces and components of the framework;
- ros2_controllers- widely used controllers, such as forward command controller, joint trajectory controller, differential drive controller;
- control_toolbox - some widely-used control theory implementations (e.g. PID) used by controllers;
- realtime_tools - general toolkit for realtime support, e.g., realtime buffers and publishers;
- control_msgs - common messages;
- kinematics_interface - for using C++ kinematics frameworks;
- gz_ros2_control - Plugin for Gazebo;
- topic_based_hardware_interfaces - hardware_interfaces for simulators and other hardware that only support ROS topic-based communication;