



9/1/25
Intro
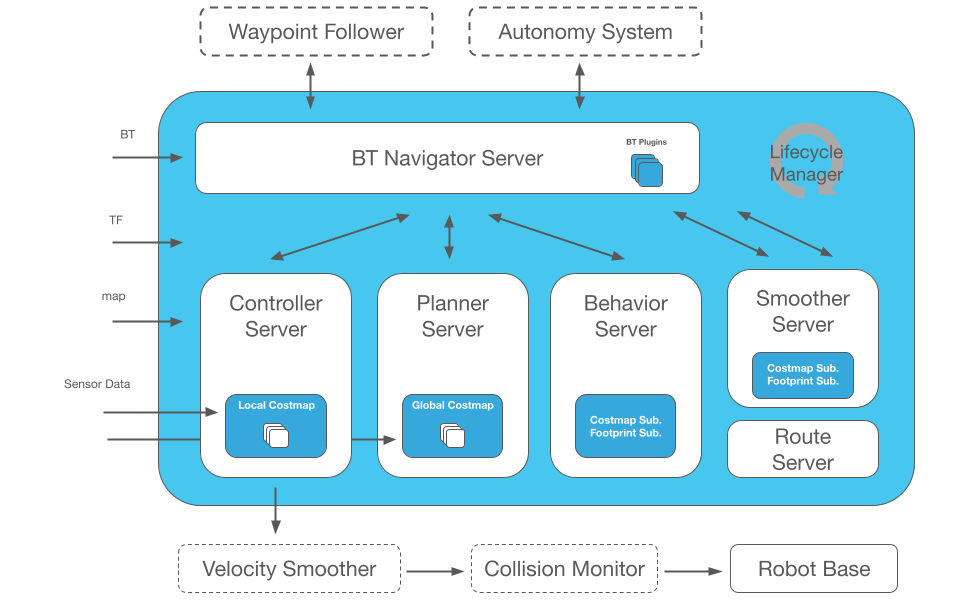
Nav2 is the professionally-supported successor of the ROS Navigation Stack deploying the same kinds of technology powering Autonomous Vehicles brought down, optimized, and reworked for mobile and surface robotics. This project allows for mobile robots to navigate through complex environments to complete user-defined application tasks with nearly any class of robot kinematics. Not only can it move from Point A to Point B, but it can have intermediary poses, and represent other types of tasks like object following, complete coverage navigation, and more. Nav2 is a production-grade and high-quality navigation framework trusted by 100+ companies worldwide.
It provides perception, planning, control, localization, visualization, and much more to build highly reliable autonomous systems. This will compute an environmental model from sensor and semantic data, dynamically path plan, compute velocities for motors, avoid obstacles, and structure higher-level robot behaviors.
The Robotics Back-End- ROS2 Nav2 Tutorial
Setup
https://docs.nav2.org/getting_started/index.html
9/15/24
Installation
- Install Nav2 packages
sudo apt install ros-humble-navigation2
sudo apt install ros-humble-nav2-bringup- Install Turtlebot3 packages
sudo apt install ros-humble-turtlebot3-gazebo